- Příspěvky: 15
- Obdržená poděkování 7
Náměšťské dny kosmonautiky a techniky 16.–18.4. 2019
- Pavlík
-
 Autor tématu
Autor tématu
- Offline
- Nováček
-

Méně
Více
4 roků 3 měsíců zpět #5396
od Pavlík
Odpověděl Pavlík pro téma Náměšťské dny kosmonautiky a techniky 16.–18.4. 2019
Pro zájemce uvádím odkaz na shlédnutí fotek ze včerejší výstavy v rámci vědecko-technické popularizační akce Náměšťské dny kosmonautiky a techniky. Návštěvníci mohli vidět skutečné rakety, modely raket a videa jejich startů a jiné zajímavosti. Skutečné rakety a jejich části byly jen starší vojenské rakety ze sbírky soukromého sběratele - pro zajímavost jsem nafotil spoustu detailů těchto dnes už historických kousků.
FOTOGALERIE Z VÝSTAVY
FOTOGALERIE Z VÝSTAVY
Prosím Přihlásit se nebo Vytvořit účet připojte se ke konverzaci.
- PetrSi
- Offline
- Nováček
-
Méně
Více
- Příspěvky: 70
- Obdržená poděkování 16
4 roků 4 měsíců zpět #5386
od PetrSi
Odpověděl PetrSi pro téma Náměšťské dny kosmonautiky a techniky 16.–18.4. 2019
To je geniální. U toho startu bych chtěl být ")
Poděkovali: Pavlík
Prosím Přihlásit se nebo Vytvořit účet připojte se ke konverzaci.
- Pavlík
-
Autor tématu
- Offline
- Nováček
-
Méně
Více
- Příspěvky: 15
- Obdržená poděkování 7
4 roků 4 měsíců zpět #5385
od Pavlík
Odpověděl Pavlík pro téma Náměšťské dny kosmonautiky a techniky 16.–18.4. 2019
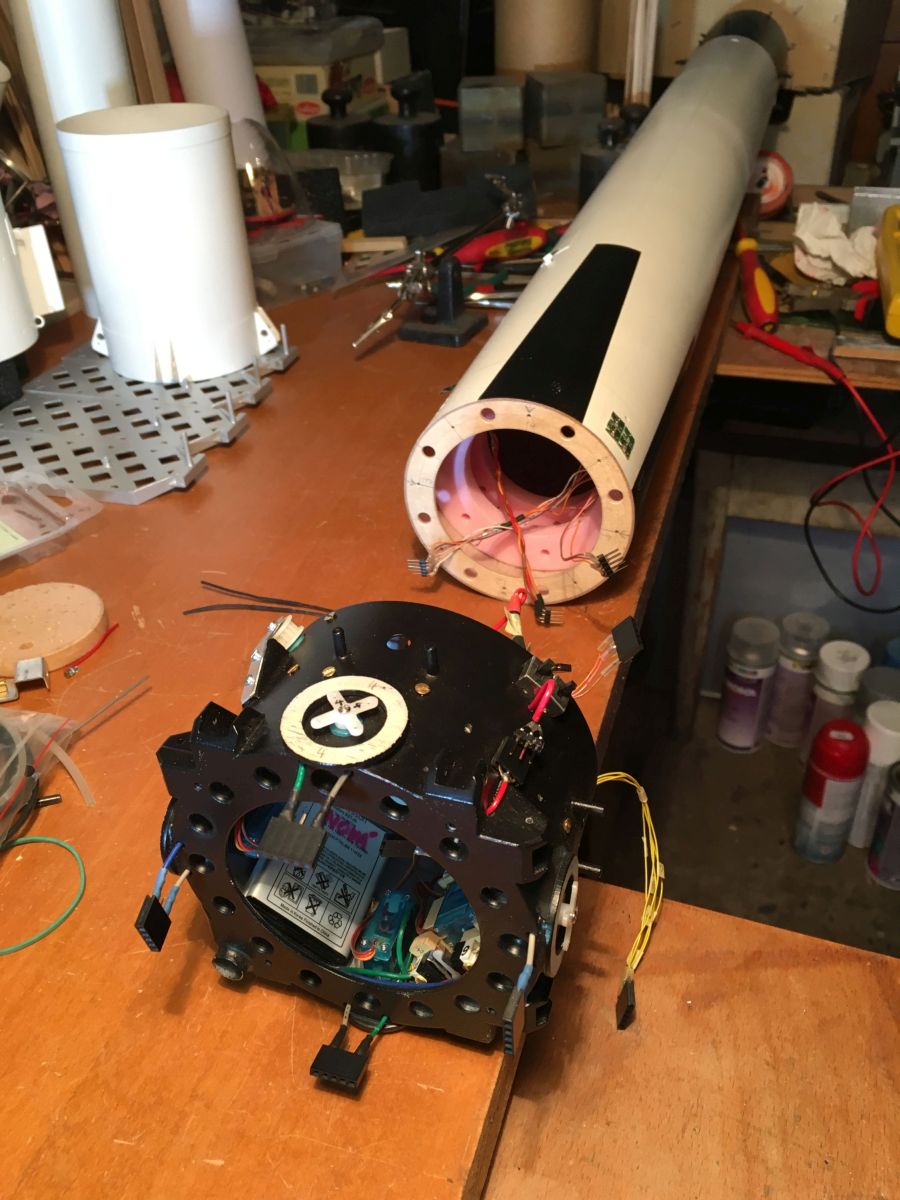
Omezovač tahu dvou raketových motorků D3-P je řešen jako částečný obraceč toku spalin z trysky. Princip jeho funkce a konstrukce je zřejmý z připojených fotek - viz v pořadí 6-té a 7-mé foto. Vlastní obraceč je zhotoven z hodinového péra ze starého budíku, které je ukotveno třmenem (červené barvy) do motorového lože. Před dosednutím/dopadem boosteru na přistávací plochu je péro drženo mimo trysku a oblast toku spalin v natažené poloze drátkem - foto 6. Při nárazu na přistávací plochu se přídržný drátek vyhákne z očka či konce péra a péro po odrazu rakety nahoru přiskočí a opře se o plášť motorku - foto 7. Hlavním úkolem tohoto omezovače či obraceče tahu je snížit riziko odskoku a převrácení boosteru při přistání. V případě správného načasování zážehu obou přistávacích motorků D3-P budou totiž tyto motorky pracovat ještě cca 1s až 2s po dopadu. A vzhledem k tomu, že tah obou motorků je jen o málo menší než váha boosteru při přistání (hmotnost boostru cca 900g) hrozil by bez omezovače tahu vysoký odskok a případně i ,,kotrmelec" boosteru. Statický tah motorku D3-P z měření publikovaného na internetu je pro informaci na posledním obrázku. Aktivace omezovače tahu může samozřejmě selhat pokud by v přistávací ploše byla v místě dotyku napruženého péra např. velká nerovnost či myší díra - ten zážitek ovšem myším nepřeji - měly by v hnízdě na chvíli docela průvan. Jsem zvědav co budou dělat běžící motorky D3-P když v plném tahu narazí tryskou na přistávací plochu???
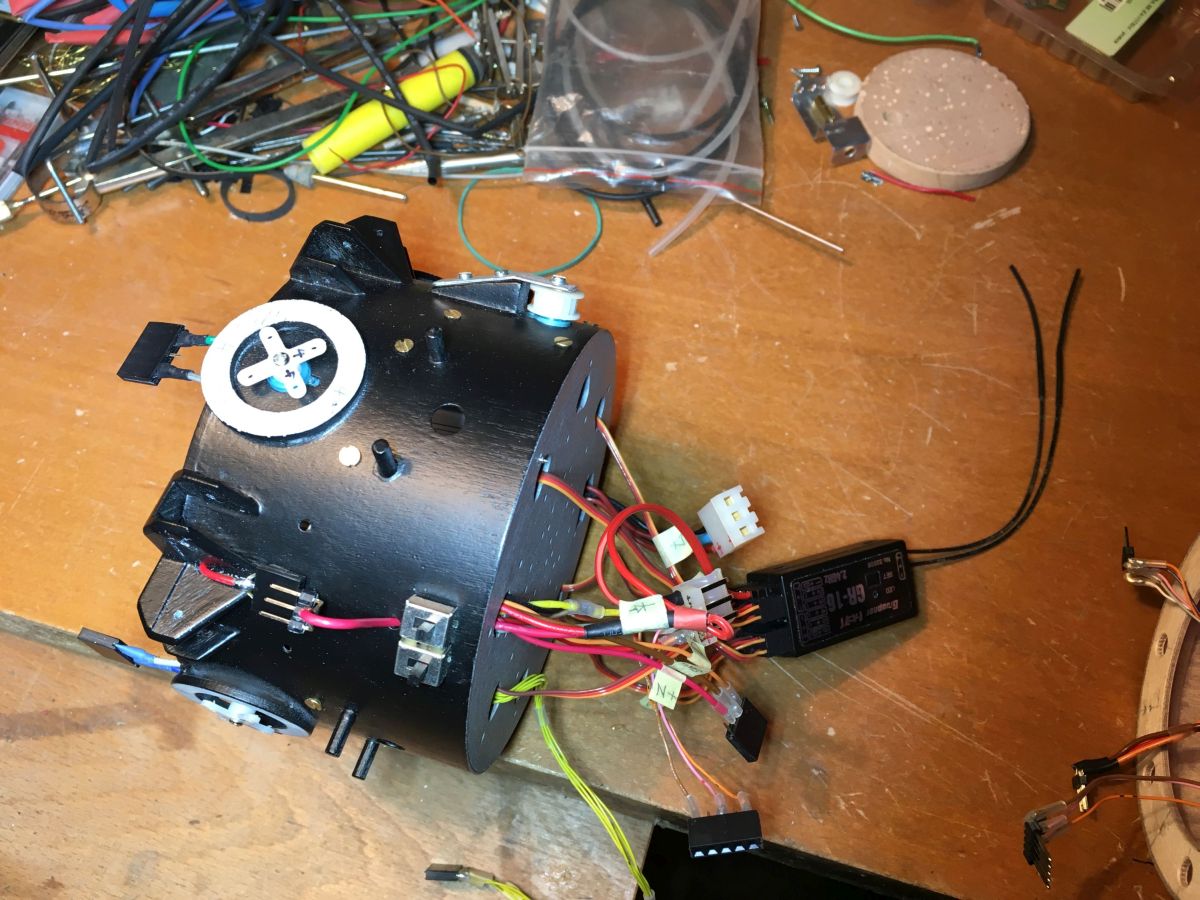
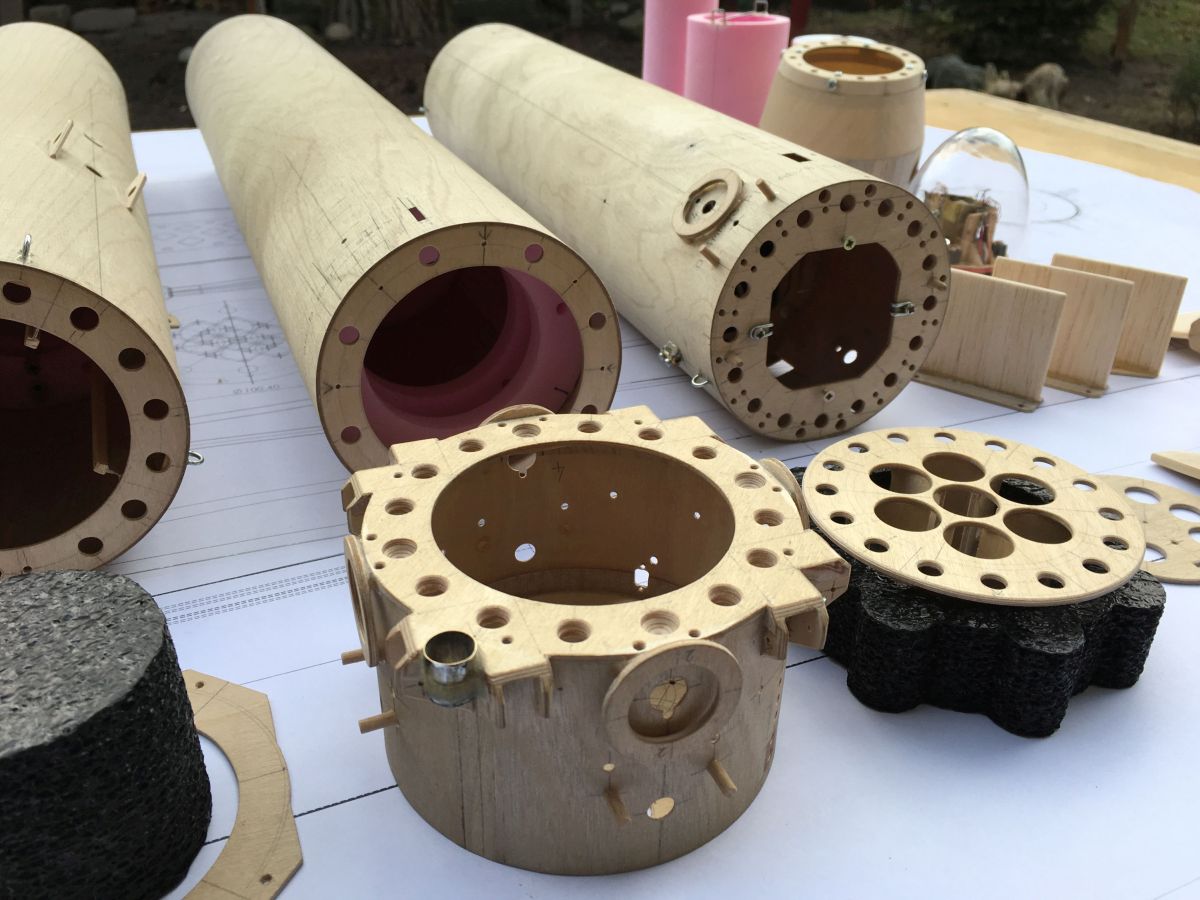
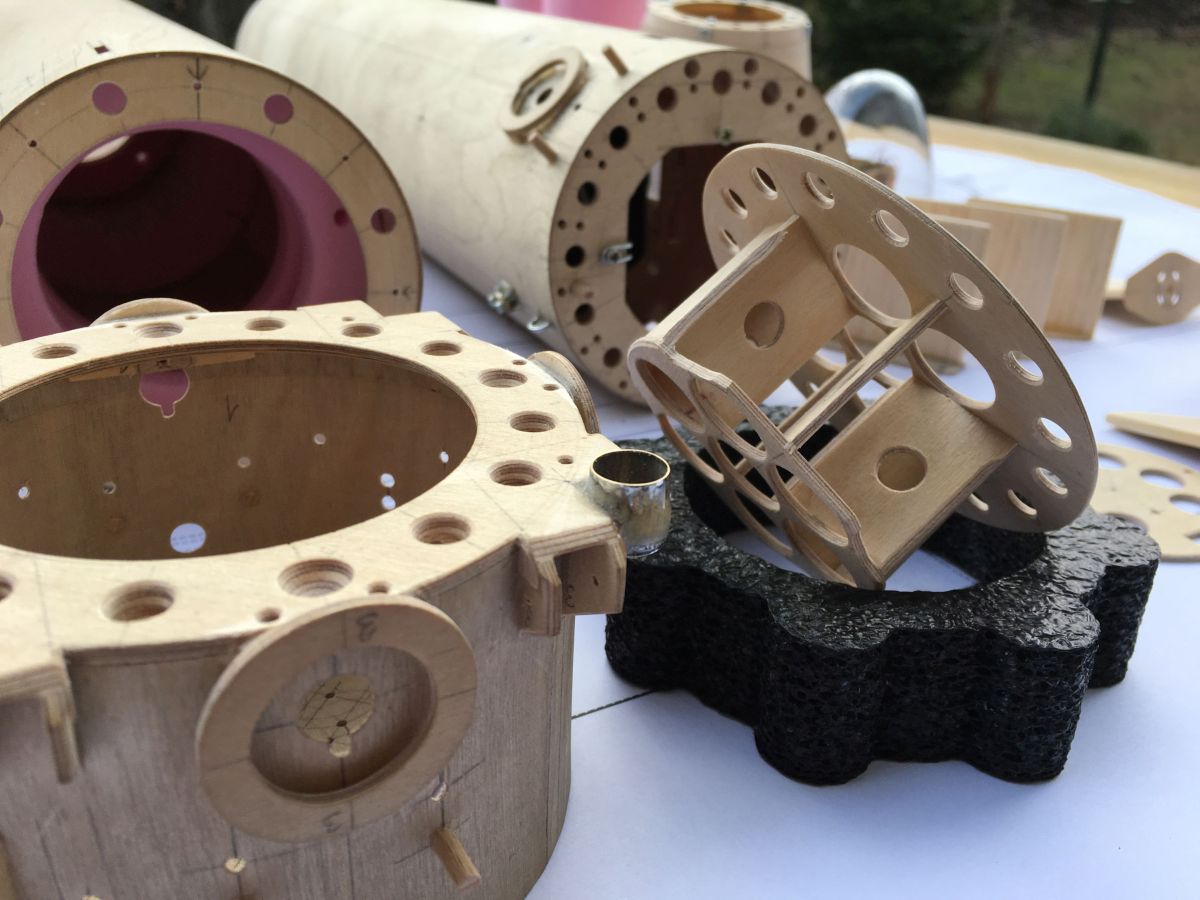
Všechny raketové motorky jsou v motorovém loži uchyceny suvně a odpruženy válcovým polyuretyanovým blokem. Měly by tak zachytit veškerou dopadovou energii boosteru. Motorové lože je k boosteru uchyceno prstencovou polyuretanovou přírubou, která slouží jako další deformační zóna v případě příliš vysoké přistávací/dopadové rychlosti. Přistávací nohy z uhlíkového kompozitu slouží jen pro udržení boosteru ve vertikální poloze a nelze s nimi pro zachycení dopadové energie počítat. Všechny čtyři vzpěry přistávacích noh mají odpružení a docela dobrý třecí tlumič díky tomu, že pružící gumičky jsou vedeny šikmo kolem trubky vzpěry. Pokud booster dopadne při cca 20 stupňovém odklonu od vertikály, dojde už ale asi k poškození přistávacích noh, vzpěr či pláště boosteru. Stávající konstrukce přistávacích noh je rovněž málo odolná k případnému snosu větrem a není schopna účinně zachytit horizontální složku dopadové rychlosti.
Modely raket s řízenou vektorizací tahu raketových motorků publikované na internetu sleduji již dlouho a velice jejich autory obdivuji bez ohledu na jejich menší či větší úspěšnost. Touto cestou se zatím jít neodvažuji. Náročnost řešených problémů po hardwarové i softwarové stránce a rozsah nutných zkoušek pro správné nastavení počítačově řízených regulačních mechanismů přesahují moje možnosti. U tohoto nového modelu rakety spoléhám při sestupném letu boosteru pouze na pasivní aerodynamickou stabilizaci. Podmínkou její správné funkce je ale dostatečná zásoba stability. Vše co šlo je tedy umístěno dole v motorové sekci. Nad motorovou sekcí je jen pár koncových snímačů, kontrolních LEDek, RC přijímač a záložní padák s vystřelovacím mechanismem. Plášť boosteru je k vůli úspoře hmotnosti stočen z překližky tl.0,4mm a vyztužen většinou přepážkami z EPS. Také rychlost sestupu nesmí klesnout pod určitou minimální velikost. Výkon raketových motorků určených pro přistání umožňuje při nevhodném načasování jejich zážehu let boosteru i zastavit. Pokud by např. ihned po zážehu motorku D9-P určeného pro 1. fázi brzdění rychlosti byly zažehnuty i oba přistávací motorky D3-P tak se booster ve vzduchu v podstatě zastaví a nebude tedy ničím stabilizován - havárie je v takové případě nevyhnutelná - pokud by byla výška boosteru ještě dostečná lze v takové situaci dálkovým povelem vystřelit záložní padák boosteru. Nedělám si ovšem přílišné iluze jak rychle a jak správně jsem schopen na různé mimořádné situace nastalé během ať už vzestupné fázi letu nebo během přistání reagovat - naprogramovaný palubní počítač či automatika v modelu rakety není a pilot vycvičený mnoha hodinami strávenými na trenažéru není a ani nebude.
Přestože CP (Center of Pressure) boosteru je dostatečně vysoko na CG (Center of Gravity), destabilizaci i jinak stabilního sestupného letu boosteru zejména při činnosti brzdících raketových motorků může způsobit např. zjednodušeně řečeno nevhodné naladění okamžité vlastní frekvence a samobuzené kývání boosteru ze strany na stranu nebo při nevhodné kombinaci s turbulencí v atmosféře. A všichni dobře víme, že i model na padáku se může při nevhodné délce šňůr dost rozkývat. Čáru přes rozpočet může způsobit i turbulence a úplav vzniklý proudem spalin brzdících raketových motorků do kterých booster doslova vletí.
Vše je ale zatím více méně teorie a nic není řádně vyzkoušené - jsem si vědom vysokého rizika a toho, že se skutečně jedná o experimentální raketu se vším všudy.
Mrzí mne přílišný nárůst hmotnosti modelu, takže výška letu bude se stávajícími raketovými motorky jen malá. Pád a brždění boosteru z větší výšky alespoň např. 200m by byl asi mnohem zajímavější. (Trefit se na plochu vymezenou pro přistání by ale zase bylo v takovém případě mnohem těžší.)
Pro informaci připojuji několik fotek ze stavby a montáže modelu rakety.
Všechny raketové motorky jsou v motorovém loži uchyceny suvně a odpruženy válcovým polyuretyanovým blokem. Měly by tak zachytit veškerou dopadovou energii boosteru. Motorové lože je k boosteru uchyceno prstencovou polyuretanovou přírubou, která slouží jako další deformační zóna v případě příliš vysoké přistávací/dopadové rychlosti. Přistávací nohy z uhlíkového kompozitu slouží jen pro udržení boosteru ve vertikální poloze a nelze s nimi pro zachycení dopadové energie počítat. Všechny čtyři vzpěry přistávacích noh mají odpružení a docela dobrý třecí tlumič díky tomu, že pružící gumičky jsou vedeny šikmo kolem trubky vzpěry. Pokud booster dopadne při cca 20 stupňovém odklonu od vertikály, dojde už ale asi k poškození přistávacích noh, vzpěr či pláště boosteru. Stávající konstrukce přistávacích noh je rovněž málo odolná k případnému snosu větrem a není schopna účinně zachytit horizontální složku dopadové rychlosti.
Modely raket s řízenou vektorizací tahu raketových motorků publikované na internetu sleduji již dlouho a velice jejich autory obdivuji bez ohledu na jejich menší či větší úspěšnost. Touto cestou se zatím jít neodvažuji. Náročnost řešených problémů po hardwarové i softwarové stránce a rozsah nutných zkoušek pro správné nastavení počítačově řízených regulačních mechanismů přesahují moje možnosti. U tohoto nového modelu rakety spoléhám při sestupném letu boosteru pouze na pasivní aerodynamickou stabilizaci. Podmínkou její správné funkce je ale dostatečná zásoba stability. Vše co šlo je tedy umístěno dole v motorové sekci. Nad motorovou sekcí je jen pár koncových snímačů, kontrolních LEDek, RC přijímač a záložní padák s vystřelovacím mechanismem. Plášť boosteru je k vůli úspoře hmotnosti stočen z překližky tl.0,4mm a vyztužen většinou přepážkami z EPS. Také rychlost sestupu nesmí klesnout pod určitou minimální velikost. Výkon raketových motorků určených pro přistání umožňuje při nevhodném načasování jejich zážehu let boosteru i zastavit. Pokud by např. ihned po zážehu motorku D9-P určeného pro 1. fázi brzdění rychlosti byly zažehnuty i oba přistávací motorky D3-P tak se booster ve vzduchu v podstatě zastaví a nebude tedy ničím stabilizován - havárie je v takové případě nevyhnutelná - pokud by byla výška boosteru ještě dostečná lze v takové situaci dálkovým povelem vystřelit záložní padák boosteru. Nedělám si ovšem přílišné iluze jak rychle a jak správně jsem schopen na různé mimořádné situace nastalé během ať už vzestupné fázi letu nebo během přistání reagovat - naprogramovaný palubní počítač či automatika v modelu rakety není a pilot vycvičený mnoha hodinami strávenými na trenažéru není a ani nebude.
Přestože CP (Center of Pressure) boosteru je dostatečně vysoko na CG (Center of Gravity), destabilizaci i jinak stabilního sestupného letu boosteru zejména při činnosti brzdících raketových motorků může způsobit např. zjednodušeně řečeno nevhodné naladění okamžité vlastní frekvence a samobuzené kývání boosteru ze strany na stranu nebo při nevhodné kombinaci s turbulencí v atmosféře. A všichni dobře víme, že i model na padáku se může při nevhodné délce šňůr dost rozkývat. Čáru přes rozpočet může způsobit i turbulence a úplav vzniklý proudem spalin brzdících raketových motorků do kterých booster doslova vletí.
Vše je ale zatím více méně teorie a nic není řádně vyzkoušené - jsem si vědom vysokého rizika a toho, že se skutečně jedná o experimentální raketu se vším všudy.
Mrzí mne přílišný nárůst hmotnosti modelu, takže výška letu bude se stávajícími raketovými motorky jen malá. Pád a brždění boosteru z větší výšky alespoň např. 200m by byl asi mnohem zajímavější. (Trefit se na plochu vymezenou pro přistání by ale zase bylo v takovém případě mnohem těžší.)
Pro informaci připojuji několik fotek ze stavby a montáže modelu rakety.


Poděkovali: Wald, PetrSi
Prosím Přihlásit se nebo Vytvořit účet připojte se ke konverzaci.
- Wald
-

- Offline
- Nováček
-
Méně
Více
- Příspěvky: 11
- Obdržená poděkování 3
4 roků 4 měsíců zpět #5384
od Wald
Odpověděl Wald pro téma Náměšťské dny kosmonautiky a techniky 16.–18.4. 2019
Ano - to je tento človek bps.space to vektorovanie je zrejme nutnosť, alebo potom kompenzáci štrbinovými stabilizátormi, to pristátie, ale asi potom naozaj je možné pristáť pri tak veľkej ploche pristávacích nôh, v tom videu to nevyjde väčšinou preto - tie nohy tam má maketové, ale kombinácie obmedzenia tahu, odpruženia nôh a ich veľkosti môžu mať vplyv na stabilitu, že sa raketa neprevráti..
Poděkovali: Pavlík
Prosím Přihlásit se nebo Vytvořit účet připojte se ke konverzaci.
- Pandy
-

- Offline
- Expert
-

Méně
Více
- Příspěvky: 627
- Obdržená poděkování 40
4 roků 4 měsíců zpět #5383
od Pandy
Odpověděl Pandy pro téma Náměšťské dny kosmonautiky a techniky 16.–18.4. 2019
Pěkná práce ,klobouk dolů.
Jsem ale dost skeptický ohledně přistání boostrů pomocí motorků . Trochu se obávám ,že to nebude fungovat. je to sice v popisu pěkně nastíněno ale dle mě se boostr po zážehu 1-ho brzdícího motorku roztočí kolem kolmé osy k zemi. Brzdění dle mě by muselo být vektorováno a to pomocí hodně rychlého gyra. Druhou nevýhodou je nemožnost u tph měnit tah. Je to sice pěkně navrženo a to tak, že to konstruktér chytře rozvrhnul na dva motory jsa si vědom problematiky a do druhého motoru dal omezovač tahu ale bez možnosti vektorování tahu to stejně nebude fungovat. Samozřejmě se budu rád mýlit .ale na you-tube lze shlédnout několik videí s tímto přistáním dokonce jeden konstruktér vymyslel a na 3d tiskárně zhotovil držák motoru jenž umožnuje vektorování tahu ,pěkně muto chodilo i s 3osým gyrem ,ale stejně to havarovalo.
Jsem ale dost skeptický ohledně přistání boostrů pomocí motorků . Trochu se obávám ,že to nebude fungovat. je to sice v popisu pěkně nastíněno ale dle mě se boostr po zážehu 1-ho brzdícího motorku roztočí kolem kolmé osy k zemi. Brzdění dle mě by muselo být vektorováno a to pomocí hodně rychlého gyra. Druhou nevýhodou je nemožnost u tph měnit tah. Je to sice pěkně navrženo a to tak, že to konstruktér chytře rozvrhnul na dva motory jsa si vědom problematiky a do druhého motoru dal omezovač tahu ale bez možnosti vektorování tahu to stejně nebude fungovat. Samozřejmě se budu rád mýlit .ale na you-tube lze shlédnout několik videí s tímto přistáním dokonce jeden konstruktér vymyslel a na 3d tiskárně zhotovil držák motoru jenž umožnuje vektorování tahu ,pěkně muto chodilo i s 3osým gyrem ,ale stejně to havarovalo.
Poděkovali: Pavlík
Prosím Přihlásit se nebo Vytvořit účet připojte se ke konverzaci.
- PetrSi
- Offline
- Nováček
-
Méně
Více
- Příspěvky: 70
- Obdržená poděkování 16
4 roků 4 měsíců zpět #5382
od PetrSi
Odpověděl PetrSi pro téma Náměšťské dny kosmonautiky a techniky 16.–18.4. 2019
To vypadá impozantně! Paráda. Jak je řešen omezovač tahu motorků D3P?
Dík
Dík
Poděkovali: Pavlík
Prosím Přihlásit se nebo Vytvořit účet připojte se ke konverzaci.
Moderátoři: Koudy
Vygenerováno za 0.315 sekund


